@suqcolin 是滴
Y
yanrudan 发布的帖子
-
强化学习 学习心得(3)发布在 AI方向
** 这部分还没完全写完,后续继续补充**
DDPG
DDPG算法是对前面AC,DQN,PG算法的综合,集合了各个算法的优点。最后有四个网络。Actor和Critic网络下分别有还有eval,target网络,eval与target网络的结构是一样的。DDPG采取确定性策略:
,其中 就是产生确定性动作的策略网络参数。 Actor:J(-Q)就是loss,至于这里为什么要将Q与a相乘,可能是因为莫烦文章中说的:前半部分的Q,从Critic得到,是Actor要考虑如何移动得到最大的Q,后半部分的
是Actor要如何修改自身的参数,使之更有可能做这个动作。两者合起来Actor要朝着可能获取大Q的的方向去修改参数。
Actor网络的loss是q,原因是:
,其中 就是Actor自身的参数。Actor网络最后输出的是一个动作,预测动作。a由Actor网络直接输出获得 Critic:L就是loss,借鉴了DQN和Q-learning
$$
y_{i}=r_{i}+\gamma Q^{\prime}\left(s_{i+1}, \mu^{\prime}\left(s_{i+1} | \theta^{\mu^{\prime}}\right) | \theta^{Q^{\prime}}\right)\
L=\frac{1}{N} \sum_{i}\left(y_{i}-Q\left(s_{i}, a_{i} | \theta^{Q}\right)\right)^{2}
$$
在Critic网络中,最后得到的,这个a就是从Actor网络中输出的a。DQN的target是得到所有动作的q值取max,而DDPG的Critic是得到一个确定的q值。 PPO
如果一句话概括 PPO: OpenAI 提出的一种解决 Policy Gradient 不好确定 Learning rate (或者 Step size) 的问题。PPO 利用 New Policy 和 Old Policy 的比例, 限制了 New Policy 的更新幅度, 让 Policy Gradient 对稍微大点的 Step size 不那么敏感。
限制的部分就在于actor的更新,A会乘一个新旧概率比,如果差距大优势大那么学习幅度就加大 。
下面是理解后面复杂公式的前提基础:
下面的新旧概率的比值要理解on-policy ,off-policy的问题,正是因为在PG算法中的每轮的更新需要采取一回合的数据来训练,这个取样所花的时间就很多,所以这个地方改进了算法,让一个策略来取样,取样数据拿来在训练 策略
$$
Gradient;for;update \
=E_{\left(s_{t}, a_{t}\right) \sim \pi_{\theta}}\left[A^{\theta}\left(s_{t}, a_{t}\right) \nabla \log p_{\theta}\left(a_{t}^{n} | s_{t}^{n}\right)\right] \
=E_{\left(s_{t}, a_{t}\right) \sim \pi_{\theta^{\prime}}}\left[\frac{P_{\theta}\left(s_{t}, a_{t}\right)}{P_{\theta^{\prime}}\left(s_{t}, a_{t}\right)} A^{\theta'}(s_t,a_t) \nabla \log p_{\theta}\left(a_{t}^{n} | s_{t}^{n}\right)\right] \
=E_{\left(s_{t}, a_{t}\right) \sim \pi_{\theta^{\prime}}}\left[\frac{p_{\theta}\left(a_{t} | s_{t}\right)}{p_{\theta^{\prime}}\left(a_{t} | s_{t}\right)} \frac{p_{\theta}\left(s_{t}\right)}{p_{\theta^{\prime}}\left(\mathbf{s}{t}\right)} A^{\theta'}\left(s{t}, a_{t}\right) \nabla \log p_{\theta}\left(a_{t}^{n} | s_{t}^{n}\right)\right]\
# 令\frac{p_{\theta}(s_t)}{p_{\theta'}(s_t)}=1,人为使得,因为这个式子不好算\
# \nabla f(x)=f(x) \nabla \log f(x);上面的式子是\nabla,下面的是原来的式子\
J^{\theta^{\prime}}(\theta)=E_{\left(s_{t}, a_{t}\right) \sim \pi_{\theta^{\prime}}}\left[\frac{p_{\theta}\left(a_{t} | s_{t}\right)}{p_{\theta^{\prime}}\left(a_{t} | s_{t}\right)} A^{\theta^{\prime}}\left(s_{t}, a_{t}\right)\right]
$$后面加入的KL惩罚项是想让
不要相差太多,所以给出了一个惩罚项,相差太多之后,这样的计算方式就会出现问题。 Actor更新有两种方式:(最大化L)
第一个是用KL pernaty:
第二个是用clipped surrogate objective:
$$
L^{C L I P}(\theta)=E_{\left(s_{t}, a_{t}\right) \sim \pi_{\theta^{\prime}}}\left[\min \left(\left[\frac{\pi_{\theta}\left(a_{t} | s_{t}\right)}{\pi_{\theta_{\text {old }}}\left(a_{t} | s_{t}\right)} \hat{A}{t}\right]\hat{A}{t}, \operatorname{clip}\left(\frac{\pi_{\theta}\left(a_{t} | s_{t}\right)}{\pi_{\theta_{\text {old }}}\left(a_{t} | s_{t}\right)}, 1-\epsilon, 1+\epsilon\right) \hat{A}_{t}\right)\right]
$$
Critic的更新方式:(最小化loss,这里就和AC算法一模一样)
之所以有新旧参数,是因为
,要更新啊。<u>(感觉这里又和DQN有点像)</u> SAC
soft actor critic 慢AC 算法
这个部分是自己从看论文到实现一整个SAC都实现了,关于论文网上也有很多的内容,也是各有各的讲法,所以也是需要好好的总结一下的。
基于最大熵的强化学习,熵最高的策略具有更高的随机性。在策略中允许高度随机的动作,更能够顺利的适应预期之外的干扰。是off-policy的。增加熵也就说明策略的随机性增强,所以会增加更多的探索,从而可以加快后续的学习速度。
熵可以理解为一个值,用来衡量一个随机变量的随机性有多强。如果出现一个东西的概率很大,那么这个变量的熵就很小。
假设x ~ P,P是一个分布那么x的熵H的计算方式为:

在熵正则化中,agent每个step都会获得一个与当前时间, step对应的policy的熵成比例的一个奖励。这样一来,强化学习中的奖励就变为了:(下面是最大化奖励的策略)

其中α就是熵正则化系数,那么其价值函数(状态价值函数)(从当前状态开始到最终状态时系统所获得的累加回报的期望)对应为:(γ是折损因子)(价值函数是用来评估策略函数的)

Q函数(状态动作价值函数)(给定一个状态
,采取动作
后,按照某一策略
与环境继续进行交互,得到的累计回报的期望值)对应为:

V^π,Q^π的关系:

E[Qπ(s,a)]这个就是下面的表示:

Qπ的贝尔曼方程(当前状态和下一个状态之间的递归关系)为:(也是Qπ和Vπ之间的关系)

SAC会同时学习策略(一个策略网络)+两个Q函数(两个Q网络)。目前对于SAC来讲有两种实现方式,一种是使用一个固定的熵正则化系数α,另一种是在训练过程中自动求解熵正则化系数。
使用了clipped double-Q trick,两个Q函数共享一个目标,计算时使用两个Q函数中给出的最小Q值得那个:

求期望是对下一个状态和下一个动作求期望:

SAC中的Q的损失函数是:

学习策略:最大化值函数V:

优化策略的方法:reparameterization trick(重参数技巧)

reparameterization trick使得我们可以将对动作的期望(这里有一个痛点:动作分布取决于策略参数)重写为对噪声的期望(消除痛点:此时动作分布不依赖于策略参数)
那么策略网络的loss:

总结归纳
-
RL的四个要素:
策略
1)确定策略:
2)随机策略:
奖励函数:
r 这个不用多说
累计奖励函数:(需补充)
V 一个策略的优劣取决于长期执行这一策略后的累积奖励,常见的长期累积奖励:
1)
2)
3)
,如:Sarsa-lambda,GD等 4)...
上面这些大多用在后面的加入了神经网络的RL算法中间。作为placeholder输入进行训练的。
模型:
所有强化学习都是马尔科夫决策的过程:(需补充)
附录一
PG算法使用的是交叉熵,SAC算法使用的是相对熵(KL散度),那么为什么在强化学习中会用到熵呢?
熵(信息熵)
熵用来衡量一个系统的混乱程度,代表系统中信息量的总和;熵值越大,表明这个系统的不确定性就越大。 信息量是衡量某个事件的不确定性,而熵是衡 量一个系统的不确定性。
一般我们使用:
$$
信息熵=\sum_{x=1}^n (信息x发生的概率*验证信息x需要的信息)
$$信息熵就是所有信息的期望:
其中表示的就是信息量,负号是为了保证信息量为非负数。 那为什么信息量这样表示呢?
假设我们有两个不相关的x和y时间,两个事件同时发生的获得的信息量就是各个事件信息量的和,即为
I(x,y)=I(x)+I(y) 。因为两个事件独立不相关,所以p(x,y)=p(x)p(y) 。我们取对数就可以得到log p(x,y)=log p(x)+log q(x) . 我们想要让信息熵最小(消除不确定性),那么就是为0嘛!所以就是I(x)= - log p(x) . 这个负号有意思,又保证了信息量为非负数,又与p(x)成了反比。
交叉熵
表示使用分布q(x)表示目标分布p(x)的困难程度。
交叉熵的公式:
一般p(x)表示真实分布,q(x)表示模型的预测分布相对熵(KL散度)
表示同一个随机变量的两个不同分布间的距离。
对于一个随机变量x有两个单独的概率分布p(x)和q(x),那么相对熵:
$$
D_{KL}(p||q)=\sum_{i=1}^np(x_i)log(p(x_i)/q(x_i))\
=\sum_{i=1}^mp(x_i)log(p(x_i))-\sum_{i=1}^mp(x_i)log(q(x_i))\
=-H(p)+H(p,q)
$$
总的来说,相对熵是用来衡量同一个随机变量的两个不同分布之间的距离。在实际应用中,假如p(x)p(x)是目标真实的分布,而q(x)q(x)是预测得来的分布,为了让这两个分布尽可能的相同的,就需要最小化KL散度。所以为什么计算loss我们使用相对熵(SAC算法),因为我们可以得到:
相对熵=交叉熵 - 信息熵
因为一般p(x)是目标(训练数据)的分布,是固定的,有时候最小化相对熵也等于最小化交叉熵。
所以经常看到把交叉熵当做loss,交叉熵损失函数:
**最大似然估计( max linkehood estimate) **
通过若干次试验,观察其结果,利用试验结果得到某个参数值能够使样本出现的概率为最大,则称为极大似然估计。
设有一组训练样本
,该样本的分布为 。假设使用 参数化模型得到 ,现用这个模型来估计X 的概率分布,得到似然函数
最大似然估计就是求得使得 的值最大,也就是
对上式的两边同时取log,乘积变成加法 ,等价优化log的最大似然估计即log-likelyhood,最大对数似然估计
对上式的右边进行缩放并不会改变argmax 的解,上式的右边除以样本的个数m
上式就是求随机变量X的函数的均值,根据大数定理,随着样本容量的增加,样本的算术平均值将趋近与随机变量的期望
于是最大化似然估计变成了:(x是训练样本,所以才是x~p的分布)
$$
\theta_{ML}=\arg\max_\theta E_{x\sim P}(\log q(x;\theta))\
=\arg\min_\theta E_{x \sim p}(-\log q(x;\theta))
$$
然后我们在看看KL散度:
$$
\begin{aligned}
D_{K L}(p | q) &=\sum_{i} p\left(x_{i}\right) \log \left(\frac{p\left(x_{i}\right)}{q\left(x_{i}\right)}\right) \
&=E_{x \sim p}\left(\log \frac{p(x)}{q(x)}\right) \
&=E_{x \sim p}(\log p(x)-\log q(x)) \
&=E_{x \sim p}(\log p(x))-E_{x \sim p}(\log q(x))
\end{aligned}
$$
前一个式子是固定的,所以最小化交叉熵就和最大化对数似然估计是等价的。多分类交叉熵
二分类交叉熵
-
-
强化学习 学习心得(2)发布在 AI方向
PG
从这里开始就与上面的value-based方法不一样了,value-based方法最后输出的action的一个Q表,policy-based方法输出的直接是一个动作,而且还可以在连续的分布上选取动作。PG是回合更新的。采取随机性策略:
,其中 是产生随机性动作的策略网络的参数 .
$$
\theta \leftarrow \theta+\alpha \nabla_{\theta} \log \pi_{\theta}\left(s_{t}, a_{t}\right) v_{t}\
\theta就是GD网络的参数\
这样可能看的懂一些:\theta \leftarrow \theta+\alpha \nabla_{\theta} \log p_{\theta}\left(s_{t}, a_{t}\right) r_{t}\
p就是概率,r_t就是reward \
loss = \frac{1}{N} \sum r*\log p
$$下一步a根据最后的概率来选择
关于代码中的一些问题:
-
PG算法中间有一个预测动作的神经网络,最后输出的张量的shape:[None,n_actions],然后再求这个预测值与现实中的动作的cross-entropy误差
公式:
$$H_{y^{\prime}}(y)=-\sum_{i} y_{i}^{\prime} \log \left(y_{i}\right) ;y_i是预测值,y_i'是真实值$$ (最大化r*logp就是最小化—r*logp)。因为强化学习中现实的动作并不一定都是正确的,所以后面还要乘以每一回合reward用来更正预测。<u>如果不用cross-entropy来计算误差,能否不用log?</u> 这里的loss函数是为了配合policy gradient ,因为输出是概率,所以 需要一个概率之间进行比较的函数,选择了cross entropy。莫烦老师代码中的实现是用的tf.nn.sparse_softmax_cross_entropy_with_logits,这个函数包含了“-” 号。
这里也可以从优化的角度思考,loss =-log(p)*r, p和r都是向量,如果如果p小,则-log(p) 大,r大则loss 更大。r的值和p的值没有关系,所以为了让loss小,只能让r最大的位置的p最大,即收益最大的位置的概率最大
这个地方看了台大李宏毅老师的讲解之后,我发现这个地方的log是直接算出来的:这个地方就和莫烦老师的想法不是很一样。
$$
\bar{R}{\theta}=\sum{\tau} R(\tau) p_{\theta}(\tau)\
\nabla \bar{R}{\theta}=\sum{\tau} R(\tau) \nabla p_{\theta}(\tau)=\sum_{\tau} R(\tau) p_{\theta}(\tau) \frac{\nabla p_{\theta}(\tau)}{p_{\theta}(\tau)}\
=\sum_{\tau}R(\tau)p_{\theta}(\tau) \nabla \log p_{\theta}(\tau)\
#依据是:\nabla f(x)=f(x) \nabla logf(x)\
=E_{\tau \sim p_{\theta}(\tau)}\left[R(\tau) \nabla \log p_{\theta}(\tau)\right] \approx \frac{1}{N} \sum_{n=1} R\left(\tau^{n}\right) \nabla \log p_{\theta}\left(\tau^{n}\right)=\frac{1}{N} \sum_{n=1}^{N} \sum_{t=1}^{T_{n}} R\left(\tau^{n}\right) \nabla \log p_{\theta}\left(a_{t}^{n} | s_{t}^{n}\right)
$$ -
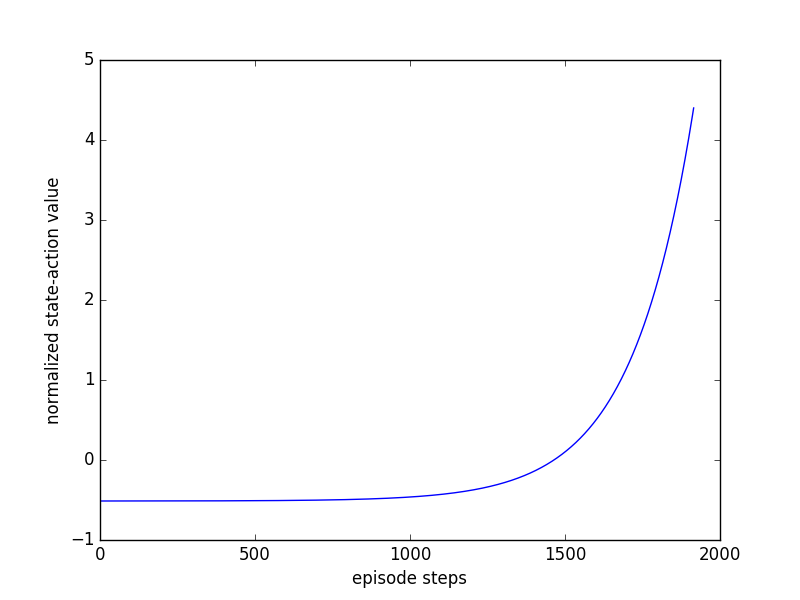
关于每一回合的reward,最后的reward是一个list,通过归一化,我们可以看到每一回合的reward使如何变化的。对于CartPole-v0的第一回合,图如下:
这只是第一回合的reward,不是全部回合的reward,可以看到前面的reward很大,说明前面的行为要重视,后面的reward很小(杆子要掉下来了),所以后面的行为要惩罚。
对于MountainCar-v0的第30回合的图如下:
这是第30回合的reward,不是整个回合的reward,可以看到通过前29轮的训练,在第30轮,小车已经可以到达终点了,所以后面的行为要重视。
<u>这里有一个问题,每一回合所有的reward都经过了衰减的处理,而且是倒序的衰减处理,第一个reward反而衰减越小,这个的意思是每一回合的reward都与最后一个reward关系最大,同时考虑之前reward的影响吗?</u>
reward的衰减是与游戏本身有关系的:
如果是目标到达类的游戏,比如到达某个点才有最大的收益,我们会用这种在最终才有较大收益的曲线
如果是保持状态类的,在保持状态的初期有较大的收益,但是偏离了状态,则收益大幅下降。
当然在李宏毅教授的课件当中还提到了一个叫做baseline的东西,用于对reward都为正数的游戏,在这种情况下,我们将简单的
变成 , 可以用 来代替。让reward也有负的时候,这样的好处我在这个地方不知道如何描述,具体可看李宏毅教授课件中的讲解( https://www.bilibili.com/video/BV1iE411e7KQ?p=1 ),这样有正有负的reward对训练也很有帮助!在莫烦老师代码中我还看到一种方法就是对reward归一化,我觉得这样也可以! 还有一个地方就是在上面的
也可以变化为 的样子,前面的 就是一个小于1的衰减系数, 就是一个从当前开始到最后的一个reward。当然这个地方我也有点奇怪,啥从当前开始到最后的reward,后来我想了一下,n就是一回合中总的步数, 就是所有的回合数,这样就是指当前这个回合中所有的reward的和,这样就和莫烦老师代码中的含义一样了。 还有一个地方就是关于cross_entrop的地方,这个交叉熵到底做了什么,为什么里面会用到one-hot编码,最后的为什么只有logp,而不是qlogp这样的交叉熵的形式。
AC
AC算法也是一个很重要的算法,后面的ddpg,dppo,a3c等算法都与它有关。Actor就是PG算法,Critic就是评判函数。AC是单步更新的。(有人说:AC就是PG加Q-learning)
Actor中与PG不一样的地方就是,用现实和估计的差距(TD error)代替了原来的一回合的reward,Actor网络输出的是所有动作的概率值。
这里的td_error就是A 优势函数,那么什么是优势函数?
优势函数表达在状态s下,某动作a相对于平均而言的优势。
从数量关系来看,就是随机变量相对均值的偏差。
使用优势函数是深度强化学习极其重要的一种策略,尤其对于基于policy的学习。TD error:
,v就是在s下得到的value(相当于q值吧),v和v_都由由Critic得到。 因为不是回合更新的,所以用
$$
loss= \log p_{\theta}\left(s_{t}, a_{t}\right) td_error\
\theta \leftarrow \theta+\alpha \left(R_{t+1}+\gamma \hat{v}\left(S_{t+1}\right)-\hat{v}\left(S_{t}\right)\right) \nabla_{\theta} \log \pi\left(A_{t} \mid S_{t}, \theta\right)
$$
的时候p概率只是针对单次的state做出的action的概率,action根据概率随机选择选择得到的。要求loss的最大值,就是求—loss的最小值。(actor的loss和PG算法的loss非常相似,可以看到,这里就是把PG中的V换成了td_error。负号也是和PG一模一样)Critic的
,Critic的作用就是计算v_和优化前面的loss。优化loss部分和之前的DQN类似哎。Critic网络输出的是s的v值。<u>这个网络中状态s的价值和DQN中q值有什么不同?</u> AC的特点就是有两个网络分别学习,一般情况下,会要求A的学习率大于C的学习率,这里的目的是让A对于动作的更新更准确
这里的V值和Q值,其实没什么区别,这里的critic网络就是直接对Q值的直接估计
<u>前面的DQN,GD,AC网络最后的reward值是:_reward * 0.95 + ep_rs_sum * 0.05,想知道为什么是这个样子?</u>
首先,这个曲线是一个指数衰减的曲线,比较平滑,一般这样做的目的是为了平滑曲线
另外这里的running reward 你是否指的是:
ep_rs_sum = sum(RL.ep_rs) if 'running_reward' not in globals(): running_reward = ep_rs_sum else: running_reward = running_reward * 0.99 + ep_rs_sum * 0.01 if running_reward > DISPLAY_REWARD_THRESHOLD: RENDER = True # rendering print("episode:", i_episode, " reward:", int(running_reward)) # 这段代码的目的是评估当前的学习器是否达到了一个比较好的水平,如果达到了,则可以进行render 渲染,就是把图像打印出来,因为打印图像一般比较耗时 # 使用running_reward是因为进行了平滑之前的曲线,可能有部分步达到了比较好的水平,但是是炸胡,平滑保证能持续达到比较好的水平才进行渲染和打印数值Actor Critic优点:可以进行单步更新, 相较于传统的PG回合更新要快.
Actor Critic缺点:Actor的行为取决于 Critic 的Value,但是因为 Critic本身就很难收敛和actor一起更新的话就更难收敛了。(为了解决收敛问题, Deepmind 提出了 Actor Critic 升级版 Deep Deterministic Policy Gradient,后者融合了 DQN 的优势, 解决了收敛难的问题)。下面提到的A3C也是早期对AC算法的优化,也有很多值得我们学习的地方。A3C
Asynchronous Advantage Actor-critic 异步优势 AC算法
相比Actor-Critic,A3C的优化主要有3点,分别是异步训练框架,网络结构优化,Critic评估点的优化。其中异步训练框架是最大的优化。
下面是A3C的框架,可见global network的下面有很多的小网络,这就是异步。公共部分的网络模型就是我们要学习的模型,而线程里的网络模型主要是用于和环境交互使用的
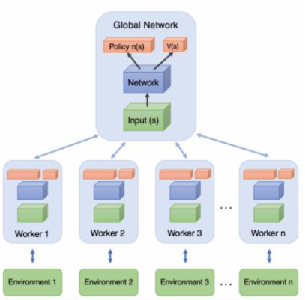
关于第二个优化,网络结构的优化。之前在 Actor-Critic中,我们使用了两个不同的网络Actor和Critic。在A3C这里,我们把两个网络放到了一起,即输入状态SS,可以输出状态价值VV,和对应的策略ππ, 当然,我们仍然可以把Actor和Critic看做独立的两块,分别处理
第三个优化是Critic评估点的优化。原来AC算法的优势函数(就是td_error)是
在A3C中,采用了N步采样来加速收敛,优势函数是:
于Actor和Critic的损失函数部分,和Actor-Critic基本相同。有一个小的优化点就是在Actor-Critic策略函数的损失函数中,加入了策略π的熵项(这不是和SAC想法一样了吗),系数为c, 即策略参数的梯度更新和Actor-Critic相比变成了这样:

这个A3C论文里面还有涉及了很多的其他要点,我觉得很有意思,来说一下。
-
我们所说的policy-based和value-based其实是有算法基础依据的。他们统统归纳与policy-gradient methods 和 action-value methods中。
我们把去估计动作值函数(action-value)然后利用其进行决策的方法叫做action-value methods
而把将策略参数化,并且每次依照当前策略参数和环境反馈,去更新参数的方法叫做policy-gradient methods,一种常见的更新方法就是策略梯度上升(gradient ascent)。
-
我们来说说policy-gradient methods的目标函数,policy-method就是根据目标函数对策略参数的导数进行优化的。
通常我们定义的目标函数是:
它的导数就是:所有a和所有s的组合
$$
\nabla J(\theta)=\sum_{s} \mu_{\pi}(s) \sum_{a} q_{\pi}(s, a) \nabla_{\theta} \pi(a \mid s, \theta)\
\text { 其中 } \mu_{\pi}(s) \text { 是值在策略 } \pi \text { 下任意时间 } t \text { 状态 } s \text { 的出现的期望 }
$$
然后我们就可以对上面的公式进行简化:
$$
对于某一个episode:\nabla J(\theta)=E_{\pi}\left[\sum_{a} q_{\pi}\left(S_{t}, a\right) \nabla_{\theta} \pi\left(a \mid S_{t}, \theta\right)\right] \
\nabla \log (f(\theta)) * f(\theta)=\nabla f(\theta)\
\nabla J(\theta)=E_{\pi}\left[q_{\pi}\left(S_{t}, A_{t}\right) \nabla_{\theta} \log \pi\left(A_{t} \mid S_{t}, \theta\right)\right]\
\theta \leftarrow \theta+\alpha \gamma^{t} q_{\pi}\left(S_{t}, A_{t}\right) \nabla_{\theta} \log \pi\left(A_{t} \mid S_{t}, \theta\right)
$$
式子中的q_{\pi}(S_t,A_t)的不同改进形成了各种的算法 -
对于REINFORCE算法就是policy-gradient methods下的一个具体的算法:
每次取样一个回合(MC算法)对参数进行更新,q(s,a)函数变为:
$$
G_{t}=\sum_{k=t+1}^{T} \gamma^{k-t} R_{k}\
\theta \leftarrow \theta+\alpha \gamma^{t} G_{t} \nabla_{\theta} \log \pi\left(A_{t} \mid S_{t}, \theta\right)
$$
REINFORCE还有扩展方法:REINFORCE with baseline
利用了等式:
这样可以在q(s,a)后面减去任意的与动作a无关的项b(s),这样可以减少算法的方差(variance)
我们可以看到,这里用的都是回合的更新,所以REINFORCE用的是MC的思想,如果改用TD的思想的话,我们就得到了AC算法。将REINFORCE中更新时使用的Gt 改为
$$
R_{t+1}+\gamma \hat{v}\left(S_{t+1}\right)-b\left(S_{t}\right)\
\text { 其中 } \hat{v}(s) \text { 是我们对状态值函数的估计,一般我们可以直接用 } \hat{v}\left(S_{t}\right) \text { 来确定 } b\left(S_{t}\right) \
\theta \leftarrow \theta+\alpha \gamma^{t}\left(R_{t+1}+\gamma \hat{v}\left(S_{t+1}\right)-\hat{v}\left(S_{t}\right)\right) \nabla_{\theta} \log \pi\left(A_{t} \mid S_{t}, \theta\right)
$$为什么减去一个b,就会减少方差呢??
-
强化学习的很多算法都是向前看的算法,即当前状态或动作的价值更新是依赖于未来状态或动作的,这样的算法称为forward view (前向视角)。前向视角实施起来多少有些不方便,毕竟未来的事,当前并知道。还有另外一种思路是所谓的backward view (后向视角),通过eligibility trace来考虑最近刚刚访问过的状态或动作。
-
熵正则化?
这到底是什么东西,我知道熵,交叉熵,相对熵,怎么不知道这个熵正则化?
看名字就知道,这个就是熵作为后面的正则化项了。那什么又是正则化?那就要你自己去了解之间的基础知识了。
-
-
强化学习 学习心得(1)发布在 AI方向
Q-learning and Sarsa
Q-learning:(off-policy)
碎碎念:这个loss就相当于是她不断趋近于0,让Q完全拟合r+
maxQ‘ 吧 Sarsa: (on-policy)
碎碎念:这个Sarsa的不同就是 取得不是最大的Q值
所以在代码中一个取Q_max,另一个取任意一个Q。介于之前
不知道值的原因,代码中在提取下一个Q的时候,是先提前赋值了的。 on-policy and off-policy的区别:
On-policy 的目标策略和行为策略是同一个策略,其好处就是简单粗暴,直接利用数据就可以优化其策略,但这样的处理会导致策略其实是在学习一个局部最优。
Off-policy将目标策略和行为策略分开,可以在保持探索的同时,更能求到全局最优值。
Sarsa Lambda
$$
\begin{aligned}
&\delta \leftarrow R+\gamma Q\left(S^{\prime}, A^{\prime}\right)-Q(S, A)\
&Q(s, a) \leftarrow Q(s, a)+\alpha \delta E(s, a)\
&E(s, a) \leftarrow \gamma \lambda E(s, a)
\end{aligned}
$$代码在建立Q表的时候,还会建立一个E表。可以看到,上面的更新是乘了E表的值。对于具体如何处理E表,代码中写的很明白。
= lambda DQN,double-DQN,dueling-DQN(涉及到构建网络)
DQN:(deep Q network)
DQN的出现是为了解决在复杂的情况下,更新Q表的方法不太现实的问题。对于DQN为什么要有两个网络,我想是因为需要一个现实Q,一个估计Q来计算差值。从而达到两个现实个估计网络几乎相同。
两个网络,一个eval来预测Q表,一个target来计算现实的Q表(Q现实就是根据这个更新的)。两个网络的结构是一样的,只是参数更新的速度不一样。
eval网络输出的是当前s的所有a的q值,eval网络的 loss:
$$
y_i=r+\gamma*maxQ(s',a')\
y_i=Q(s,a)\
loss=\left(y_{j}-Q\left(\phi_{j}, a_{j} ; \theta\right)\right)^{2}
$$
这个Q(s',a')是由target网络预测得到的。而前面的Q-learning只是Q表的更新。target网络的输出下一个s的所有a的q值,没有loss。在learn 中有一个值替换函数,是用tf.assign实现的。
下一步a根据最大的Q‘值来选择
DQN开始有了经验回放的方法。
double-DQN:
用当前Q网络计算最大Q值对应的动作,用目标Q网络计算这个最大动作对应的目标Q值,进而消除贪婪法带来的偏差。
以下是改进的公式:
$$
Y_{t}^{\text {DoubleDQN }}= r+\gamma Q'\left(s', \underset{a}{\operatorname{argmax}} Q\left(s', a ; \boldsymbol{\theta}{t}\right), \boldsymbol{\theta}{t}'\right)
$$
double-DQN和DQN的网络结构并没有什么不同,只是q-target的计算方式不一样。下面给出差别部分的代码:
if self.double_q: max_act_for_next = np.argmax(q_eval_for_next, axis=1) #q_eval_for_next = q_eval selected_q_next = q_next[batch_index, max_act4next] # Double DQN else: selected_q_next = np.max(q_next, axis=1) # the natural DQN q_target[batch_index, eval_act_index] = reward + self.gamma * selected_q_next**double-DQN的下一步的q值对应的a‘是根据eval网络来选择的。**这样就不会有很大的过拟合。
Prioriized Experience Replay DQN
PER 优先经验回放,改进了DQN中的经验回放策略,值得一看!
dueling-DQN
只要稍稍修改 DQN 中神经网络的结构, 就能大幅提升学习效果, 加速收敛 。 用一句话来概括 Dueling DQN 就是. 它将每个动作的 Q 拆分成了 state 的 Value 加上 每个动作的 Advantage.
下面是它q值的公式:
在网络中建立V与A两个输出
我们发现当可用动作越高, 学习难度就越大, 不过 Dueling DQN 还是会比 Natural DQN 学习得更快. 收敛效果更好.
value-based and policy-based 的区别:
value-based 的典型算法是DQN,policy-based是policy gradient,结合这两种具体算法可能会更好的理解。
-
处理的action space不同:value-based适合处理action space低维离散的,policy-based适合处理连续的action space。
-
针对action的价值输出不同:value-based计算出每个action的价值,policy-based一般情况下只给出较价值较高的actions。
-
更新频率不同:value-based每个action执行都可以更新,policy-based 每个episode完成之后才能更新一次。这里可以理解成下棋的时候,value-based每下一步就学习一次,而policy-based要在一盘棋下完之后再学习。
像DDPG,AC算法就是将两者都结合了起来。
单步更新(TD算法)和回合更新(蒙特卡洛算法)的区别:
这个就是字面的区别,主要是理解为什么单步是TD算法,回合是蒙特卡洛算法。
MC算法:蒙特卡罗方法又叫做统计模拟方法,它使用随机数(或伪随机数)来解决计算问题。在强化学习中,在为了能够从环境中学习,我们需要让agent与environment交互,得到一些经历(样本)。然后通过这些经历来进行策略评估与策略迭代。从而最终得到最优策略。这种做法的理论是从蒙特卡罗方法中来的。
TD算法:就是单步更新算法
有一个公式可以体现两者的差别:
$$
MC: V(S_t) \leftarrow V(S_t) + \alpha(G_t-V(S_t))\
TD: V(S_t) \leftarrow V(S_t)+ \alpha(R_{t+1} + \gamma V(S_{t+1})-V(S_t))
$$
DP(动态规划)算法:上面两个算法可以和DP算法相比较,因为这三种学习方法都是用来计算状态价值的。它们的区别在于,前两种是在不知道模型的情况下常用的方法,而MC方法又需要一个完整的episode来更新状态价值,TD则不需要完整的episode。DP方法则是基于Model(知道模型的运作方式)的计算状态价值的方法
我发现TD算法还是有一个大的种类,包括很多的东西,这个有时间可以一起总结一下。而且TD和MC是可以结合起来的,比如说A3C中的n-steps就是一个很好的结合的例子。还有一个统一的方法Eligibility traces(资格迹)。
eligibility traces 优于n-step的主要地方在于计算非常有效率,其只需要一个trace向量,而不需要储存n个特征向量。另外,eligibility trace的学习是逐步的,而不需要等到n-steps之后。
-